Hello, I'm
Adrian Poitras
Engineering enthusiast building the future through hardware, software, and relentless curiosity. From custom electric scooters to AI-powered targeting gimbals — I design, machine, and code.

Hello, I'm
Engineering enthusiast building the future through hardware, software, and relentless curiosity. From custom electric scooters to AI-powered targeting gimbals — I design, machine, and code.

Three iterations of custom electric scooters, each pushing performance further — from 3D-printed prototypes to a fully CNC-machined aluminum frame with dual-belt drivetrain, pneumatic suspension, and a custom 12s3p battery pack.
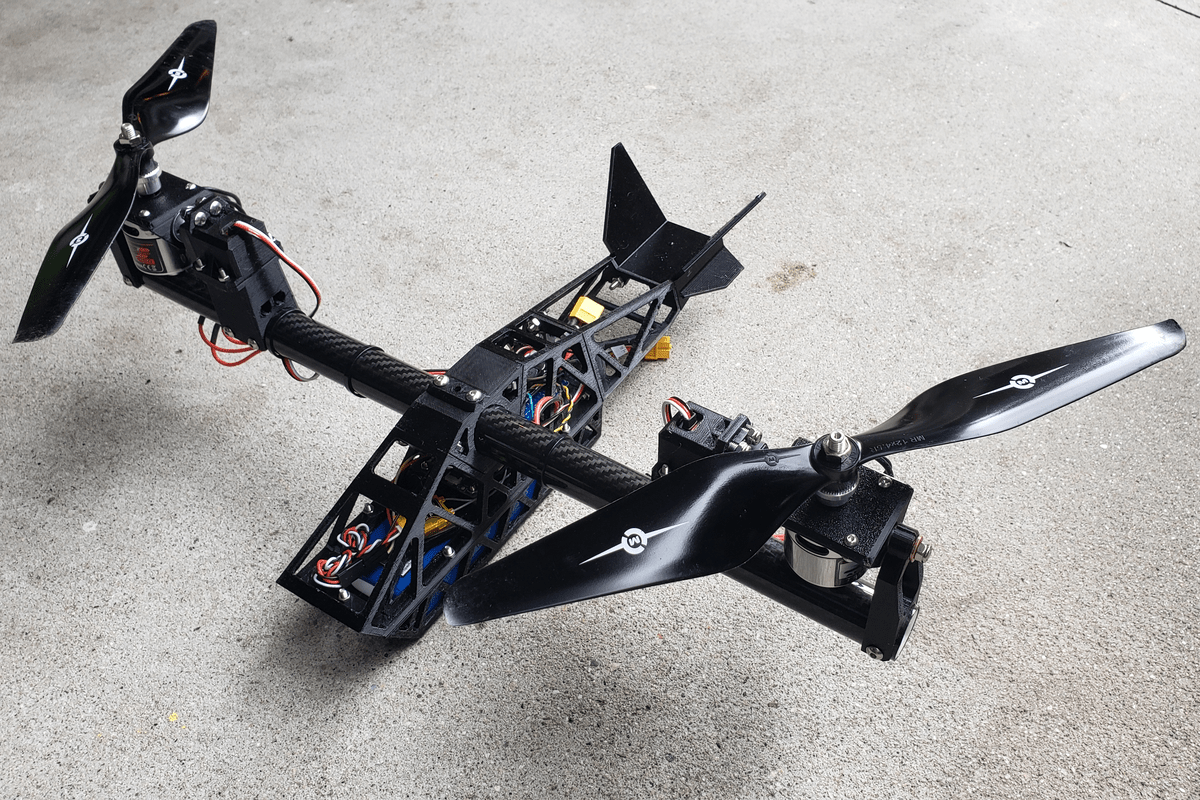
From a first quadcopter build in middle school to a V-22 Osprey-inspired bicopter with servo-tilting rotors. Explored FPV flying, PID tuning, 3D-printed PETG airframes, and stability-driven design iteration.
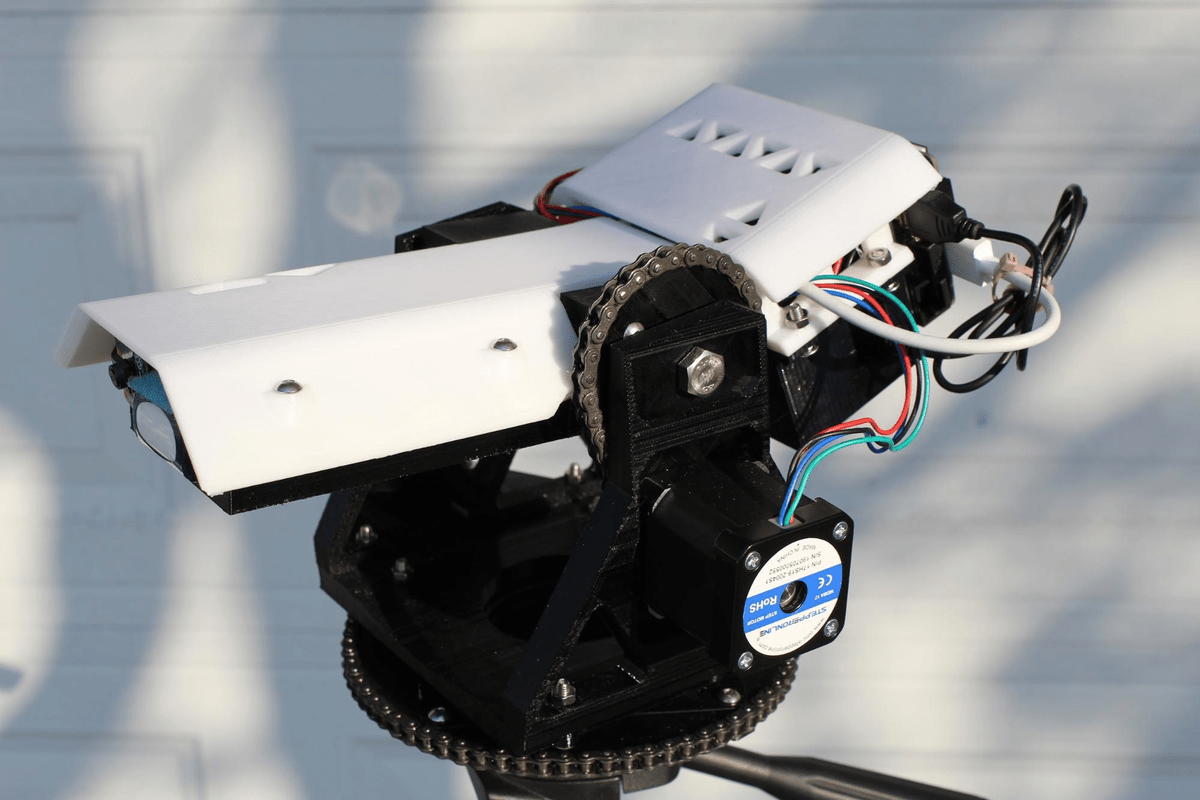
A pan-and-tilt gimbal that autonomously tracks people using a deep learning neural network running on a Google Coral USB Accelerator. Combines stepper motor control, Raspberry Pi, and TensorFlow Lite for 120 FPS real-time detection.
Feel free to reach out for collaborations or just to chat.